Custom Encoders¶
Glass Box UMAP wraps a neural network around UMAP’s loss. The choice of network, the encoder, controls what the model can learn about your data and what kinds of features it can attribute back to inputs. The library ships a strong default, and an encoder registry lets you plug in your own.
This guide is about that registry. It first walks through what the default encoder looks like and why it’s structured the way it is. Then, it describes the registry contract: what your class must promise so Glass Box UMAP can use it. And finally, as a worked example, we register a custom encoder and run it on a dataset.
The default encoder¶
The default encoder is DeepPReLUNet. It is intentionally a flat multi-layer perceptron (MLP), built from three kinds of layer:
nn.Linear(..., bias=False).VmapPReLU, a home-brewed equivalent of PReLU that’s compatible with an efficient calculation of the Jacobian via vmap.LayerNormDetached, which is a layer norm without an additive learned offset (bias term).
The combination is not arbitrary. Glass Box UMAP’s defining feature is exact per-feature attribution, and that property requires the encoder to be piecewise linear and bias-free. Linear layers without bias and PReLU activations together define a piecewise linear map. On any small neighborhood of the input space, the encoder behaves exactly like a single matrix multiplication, and that matrix is the encoder’s Jacobian at that point. Multiplying by the input recovers an exact contribution from each feature to each embedding coordinate. Add a bias or use a non-piecewise-linear activation, and that property breaks.
Here is the actual class.
from glass_box_umap.parametric_umap.models import DeepPReLUNet
DeepPReLUNet(input_dims=(64,), n_components=2)
DeepPReLUNet(
(flatten): Flatten(start_dim=1, end_dim=-1)
(model): Sequential(
(0): Linear(in_features=64, out_features=128, bias=False)
(1): VmapPReLU(num_parameters=1)
(2): LayerNormDetached()
(3): Dropout(p=0.0, inplace=False)
(4): Linear(in_features=128, out_features=128, bias=False)
(5): VmapPReLU(num_parameters=1)
(6): LayerNormDetached()
(7): Dropout(p=0.0, inplace=False)
(8): Linear(in_features=128, out_features=128, bias=False)
(9): VmapPReLU(num_parameters=1)
(10): Dropout(p=0.0, inplace=False)
(11): Linear(in_features=128, out_features=2, bias=False)
)
)
A few things worth pointing out about this architecture:
It is a flat MLP. The
Flattenat the top means the encoder is structure-agnostic. Whatever shape the input has, it sees a single long vector.Width and depth are modest. Three hidden layers of 128 units is enough to learn a good 2D embedding for most datasets without becoming hard to train.
Dropout defaults to 0. Glass Box UMAP relies on a clean, deterministic forward pass for attribution. Dropout would inject noise into the Jacobian.
Changing default encoder parameters¶
The default encoder has default parameters:
These parameters can be modified using GlassBoxUMAP’s encoder_kwargs attribute:
from glass_box_umap import GlassBoxUMAP
# Let's make the hidden size 512.
reducer = GlassBoxUMAP(
min_dist=0.1,
n_neighbors=15,
encoder_kwargs={"hidden_size": 512},
)
# I changed my mind, let's also have just 1 hidden layer
reducer.encoder_kwargs["n_hidden_layers"] = 1
# Scratch all that, I just want the defaults
reducer.encoder_kwargs = {}
The above changes all modify the encoder state. The choice only becomes hardened once fit(...) (or fit_transform(...)) is called.
The registry contract¶
Any nn.Module can be plugged in via the encoder registry. The contract is small.
Constructor signature. Your class accepts
input_dims: tuple[int, ...]andn_components: intas it’s first two arguments. Any extra kwargs are fine. They get passed throughencoder_kwargswhen you instantiateGlassBoxUMAP(seen above).Forward signature.
forward(x)returns a tensor of shape(batch, n_components). Glass Box UMAP handles batching and the rest of the training loop.Decoration. The class is registered with
@register_encoder("name"). Once registered, you can instantiate it withGlassBoxUMAP(encoder_name="your_encoder_name", encoder_kwargs={...})exactly like a built-in.For exact attribution. Every
LinearandConvlayer is bias-free, and every activation is piecewise linear.VmapPReLUis provided.
The first three are required. The fourth is required only if you want compute_contributions to keep returning exact attributions. If you’re willing to give that up, you can use any architecture you like.
A worked example: a Maxout encoder¶
The default encoder is a sequence of Linear and VmapPReLU layers. PReLU is itself a piecewise-linear function: PReLU(x) = max(αx, x), a two-way max with a tied negative-slope parameter. The whole network is a composition of two-way maxes.
Maxout generalizes that. Each Maxout unit takes a k-way max over k independent linear projections of its input. Because each piece is a separate linear function, a Maxout layer with k projections can represent any continuous convex piecewise-linear function with k pieces, while a PReLU layer of the same width is restricted to functions that are pointwise reflections of two affine pieces. With k = 2 and a tied slope you essentially recover PReLU. With larger k you get genuinely more expressive layers per unit. (In practice this means Maxout layers can be narrower than PReLU layers for the same approximation capacity, at the cost of more parameters per unit.)
This architecture satisfies our constraints. A k-way max of bias-free linear projections is itself piecewise linear and bias-free. Exact attribution still works. At any input x, exactly one of the k projections is the active one, and the local Jacobian is just that projection’s weight matrix.
Before implementing this custom encoder, let’s first take a look at the existing registry:
from glass_box_umap.parametric_umap.registry import view_registry
view_registry()
{'default': glass_box_umap.parametric_umap.models.DeepPReLUNet,
'default_conv': glass_box_umap.parametric_umap.models.ConvEncoder}
Glass Box UMAP comes shipped with the above encoders. To register your own encoder, you just need to define it, and decorate it with @register_encoder("your_encoder_name"):
import math
from torch import Tensor, nn
from glass_box_umap.components import LayerNormDetached
from glass_box_umap.parametric_umap.registry import register_encoder
class MaxoutLayer(nn.Module):
"""One Maxout layer: ``k``-way max over independent bias-free linear projections."""
def __init__(self, in_features: int, out_features: int, k: int) -> None:
super().__init__()
self.out_features = out_features
self.k = k
self.linear = nn.Linear(in_features, out_features * k, bias=False)
def forward(self, x: Tensor) -> Tensor:
z = self.linear(x).view(x.shape[0], self.out_features, self.k)
return z.max(dim=-1).values
@register_encoder("maxout_mlp")
class MaxoutEncoder(nn.Module):
"""Bias-free, piecewise-linear encoder built from Maxout layers.
Each hidden unit is a ``k``-way max over independent linear projections,
which preserves exact attribution while giving each unit more expressive
pieces than a PReLU activation does.
"""
def __init__(
self,
input_dims: tuple[int, ...],
n_components: int = 2,
hidden_size: int = 128,
n_hidden_layers: int = 3,
k: int = 4,
) -> None:
super().__init__()
in_features = math.prod(input_dims)
self.flatten = nn.Flatten()
layers: list[nn.Module] = []
prev = in_features
for i in range(n_hidden_layers):
layers.append(MaxoutLayer(prev, hidden_size, k))
if i < n_hidden_layers - 1:
layers.append(LayerNormDetached(hidden_size))
prev = hidden_size
layers.append(nn.Linear(hidden_size, n_components, bias=False))
self.model = nn.Sequential(*layers)
def forward(self, x: Tensor) -> Tensor:
return self.model(self.flatten(x))
You can verify it’s registered with another call to view_registry:
view_registry()
{'default': glass_box_umap.parametric_umap.models.DeepPReLUNet,
'default_conv': glass_box_umap.parametric_umap.models.ConvEncoder,
'maxout_mlp': __main__.MaxoutEncoder}
Running it on the digits dataset¶
The sklearn digits dataset is 8x8 grayscale images of handwritten digits, flattened here into 64-dim tabular vectors.
We hand the registered encoder to GlassBoxUMAP by name. We tailor the encoder_kwargs so that the model parameter count roughly matches the default encoder.
import numpy as np
import torch
from sklearn.datasets import load_digits
from glass_box_umap import GlassBoxUMAP
digits = load_digits()
X = torch.from_numpy(digits.data.astype(np.float32))
y = digits.target.astype(int)
print(f"X shape: {tuple(X.shape)}, dtype={X.dtype}")
print(f"y shape: {y.shape}, classes={np.unique(y)}")
X shape: (1797, 64), dtype=torch.float32
y shape: (1797,), classes=[0 1 2 3 4 5 6 7 8 9]
reducer_default = GlassBoxUMAP(
random_state=42,
quiet=True,
)
reducer_default.fit(X)
embed_default = reducer_default.transform(X)
reducer_maxout = GlassBoxUMAP(
encoder_name="maxout_mlp",
encoder_kwargs={"hidden_size": 96, "n_hidden_layers": 2, "k": 3},
random_state=42,
quiet=True,
)
reducer_maxout.fit(X)
embed_maxout = reducer_maxout.transform(X)
import matplotlib.pyplot as plt
CMAP = "tab10"
fig, axes = plt.subplots(1, 2, figsize=(12, 6))
for ax, Z, title in zip(
axes,
[embed_default, embed_maxout],
["Default encoder (DeepPReLUNet)", "MaxoutEncoder (k=3)"],
):
sc = ax.scatter(Z[:, 0], Z[:, 1], c=y, cmap=CMAP, s=8, alpha=0.85)
ax.set(title=title)
fig.colorbar(sc, ax=axes, label="digit", ticks=range(10))
plt.show()
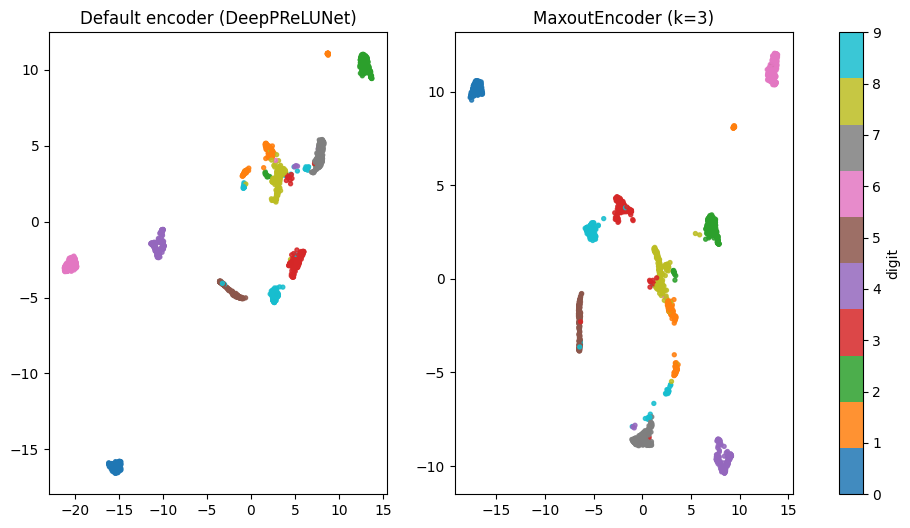
The registry let us swap a meaningfully different architecture into Glass Box UMAP without touching the library, and the result is a sensible embedding.
Exact attribution still works¶
The whole reason for the bias-free, piecewise-linear constraints is that compute_contributions returns a contribution from each input feature to each embedding coordinate, and those contributions sum exactly to the embedding. Maxout was designed to keep that property intact: a k-way max of bias-free linear functions is itself bias-free and piecewise linear. We can verify that the property still holds end to end.
contributions = reducer_maxout.compute_contributions(X)
n_samples, n_components = contributions.shape[:2]
reconstructed = contributions.reshape(n_samples, n_components, -1).sum(axis=2)
print(f"contributions shape: {contributions.shape}")
print(f"max |reconstructed - embedding|: {np.max(np.abs(reconstructed - embed_maxout)):.2e}")
print(f"matches embedding (atol 1e-4): {np.allclose(reconstructed, embed_maxout, atol=1e-4)}")
contributions shape: (1797, 2, 64)
max |reconstructed - embedding|: 3.81e-06
matches embedding (atol 1e-4): True
Saving/Loading¶
Models built on a custom encoder and then saved to disk need a small extra step at load time. Glass Box UMAP checkpoints store the encoder by name, not by class. When you call load, the library looks the name up, rebuilds an encoder of the same architecture, and then reattaches the saved weights. If your encoder’s name does not appear in view_registry() at the moment load runs, the lookup fails with ValueError: Encoder 'your_encoder_name' not found.
The fix is to make sure your @register_encoder(...) decorator has executed before you call load. In practice that means putting your encoder in an importable module and importing it on the loading side:
# Either import it
import my_project.encoders
# Or define and register it
@register_encoder("your_encoder_name")
class YourEncoder(nn.Module):
...
reducer = GlassBoxUMAP.load("model.pt")
Conclusion¶
Custom encoders can be registered using a one-line decorator, so long as its constructor takes input_dims and n_componens as its first two arguments, and forward returns a tensor of shape (batch, n_components). If you create a custom encoder, always verify it preserves exact feature attributions.
Warning
Please keep in mind that the kNN graph is upstream of the encoder. Custom architectures change how the model represents inputs, not which inputs are considered neighbors. If you need a different notion of similarity, consider supplying a precomputed nearest-neighbors graph.